微信咨询号
扫描二维码咨询周老师

团队请选择“听众团队报名”
对于单身人士,请选择“听众注册”
手机:(微信同号)
邮件:
请在来信中注明“团队报名”
会议信息
#01
人工智能已成为新一轮产业变革的核心驱动力,正在对世界经济、社会进步和人类生活产生极其深刻的影响。 第八届人工智能、自动化与控制技术国际会议(AIACT 2024)将于2024年2月29日至3月2日在泰国普吉岛举行。
AIACT 2024 由香港机械工程师学会 (HKSME) 主办,Journal of Computational and Cognitive Engineering 提供媒体支持。 我们诚挚邀请国内外人工智能、自动化与控制技术领域的专家学者参加本次会议,交流分享最新学术成果,探讨学术发展问题。
集合地点——泰国普吉岛
#02

酒店名称: 普吉岛蒂瓦娜广场酒店
预订方式:
普吉岛
普吉岛的旅游业自20世纪70年代起逐渐兴起,是东南亚具有代表性的旅游胜地。 岛的西海岸面向安达曼海,那里有原始的白色沙滩。 每个海滩都有自己的优势和魅力。 白色的海滩、奇形怪状的石灰礁、丛林覆盖的山丘每年都吸引着游客。 大量旅客。
这里海滩和海湾遍布,包括以纯净闻名的卡马拉海滩、具有私密风格的苏林海滩、经常举办海上运动的珊瑚岛、以及夜生活丰富的芭东海滩。 岛上还有很多山。 游客可以乘坐出租车和摩托车探索岛屿,还可以进行水肺潜水和游艇。
随着岛上不断发展成为高端度假区,岛上从事旅游的居民逐渐增多。 北部有菠萝田、橡胶园向游客开放; 此外,游客还可以在城内看到欧式风格的国内建筑。
注:泰国对中国游客免签入境政策有效期至2024年2月29日,3月1日起实行永久互免签证入境政策。
会议议程
#04
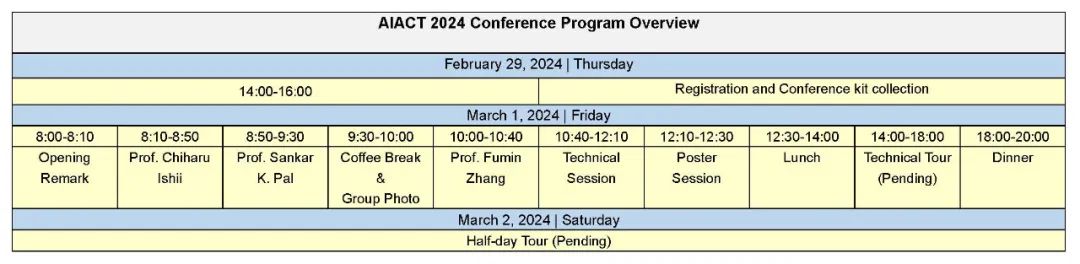
以上日程为简要概要,具体内容请参阅会前发送的文件。
(点击可放大查看)
报告专家
#05

石井千春教授
日本政法大学
Chiharu Ishii博士荣获第四届人类系统交互国际会议(IEEE HSI 2011)触觉和触觉界面领域最佳论文奖等多项奖项。 他目前是 IEEE、SICE、JSME、RSJ、IEEJ 和 JSCAS 的成员。 Chiharu Ishii 教授的研究兴趣是医疗机器人、辅助技术和鲁棒控制。
报告标题:水下作业机器人触诊系统及动力辅助服的开发
摘要:在本次演讲中,首先讨论了我们实验室开发的机器人触诊系统。 机器人触诊系统采用主从控制方法进行远程操作。 触摸物体的反作用力由 6 轴力/扭矩传感器测量,并通过触觉输入设备 Omega 呈现给操作员的手臂。 7、此外,触觉反馈装置将触觉刺激呈现给操作者的指尖。 在机器人手术中,当使用套管针进行触诊时,由于镊子受到与套管针接触的影响,因此很难实现所触摸物体的力或触觉。
因此,尝试利用神经网络来消除套管针对镊子的影响。 为了验证所开发的触诊系统的有效性,进行了位置识别实验。 结果表明神经网络的有效性,仿真肿瘤位置识别误差小于0.7mm。
其次,讨论了水下作业辅助服。 在建造防波堤地基时,投入海中的基石由潜水员手动平整。 这项工作给潜水员的身体带来很大的压力。 因此,我们实验室开发了一种可以在水下使用的肘关节助力服,以减轻潜水员手臂的负担。 为了验证所开发的动力辅助服的有效性,进行了举起和取下重物的实验,并测量肱二头肌的表面肌电图(SEMG)以评估肌肉活动。 结果,穿着辅助服时的肌肉活动比不穿着辅助服时的肌肉活动小。 由此,验证了所开发的水下作业动力辅助服的有效性。

桑卡·帕尔教授
印度统计研究所
Sankar K. Pal 教授现任印度政府国家科学主席、印度统计研究所所长和名誉教授。 他还是 AICTE 提名的 AICTE 杰出讲座教授,以及印度理工学院焦特布尔分校的常驻学者。
报告标题:模式识别、机器智能到数据科学:演变与挑战
摘要:演讲简要描述了从 20 世纪 70 年代以来的五十多年来,从母题模式识别到当今数据科学的不同阶段的演变。 它从模式识别和学习的基本概念和不同任务(即分类、聚类和特征选择)开始,并提供示例,然后介绍处理现实生活中的识别问题所面临的限制和挑战。 因此,专家系统和人工智能(1980)、基于知识的系统和机器智能(1990)等研究领域应运而生,试图使系统在推理、学习、搜索、灵活性和不确定性处理方面变得像人类一样智能。
由于2000年代的数字革命、计算能力的增强以及大型异构数据的可用性,这种演变进一步发展到数据挖掘(2000年)、大数据(2010年)等学科,最后发展到深度学习和数据科学(2020年)不同种类的。 每次导致系统智能和性能升级的演进都需要新技术和任务,这主要取决于要处理的数据类型和所需解决方案的性质。 新的术语和概念被创造出来,理论/算法被充满希望地制定出来。
出现的新任务包括规则库适应、机器学习(ML)、基于案例的推理(CBR)、案例检索、数据压缩、知识发现(KDD)和深度学习(DL),而发展的技术/工具包括软计算、模糊逻辑、粗糙技术、进化计算、深度卷积神经网络(CNN)和粒度计算(GrC)。 解释了用于实现上述目标的这些技术的特征。
模糊情况下视频跟踪的粒度挖掘被认为是大数据分析的一个例子。 对于实时交通场景中的多目标检测问题,证明了深度学习的重要性及其相对于浅层学习(传统ML)的优越性。 这里展示了 Granulated-RCNN(一种在 AlexNet 架构中结合 GrC 开发的新区域提议深度网络)在提高实时检测速度和准确性方面的优点。

张福民教授
香港科技大学,中国香港
张福民博士是香港科技大学郑嘉信机器人研究所讲座教授、所长。 他还是佐治亚理工学院电气与计算机工程学院院长的兼职教授。 张福民教授现任IEEE RAS海洋机器人技术委员会联合主席,IEEE Transactions on Automatic Control、IEEE Transactions on Networked System Control、IEEE Ocean Engineering Magazine和International Journal of Robotics Research副主编。
报告标题:微型自主飞艇的动力学与控制
摘要:无人机最近取得的重大进展需要方便的平台来支持实验和演示。 为此,四旋翼和多旋翼飞行器等无人机已变得流行。 然而,这些无人机 (UAV) 的室内使用受到每次电池充电的飞行时间(通常少于 20 分钟)以及人类共享同一物理空间的安全问题的限制。 安全网或笼子提供保护,但牺牲了人机交互实验的潜力。
我们开发了佐治亚理工学院的微型自主飞艇 (GT-MAB) 作为室内实验的飞行器,支持人类和机器人群之间的安全交互。 GT-MAB 的飞行时间相对较长,每次电池充电可达两小时。 此外,飞艇具有自然缓冲作用,与人类碰撞时不会造成任何疼痛。 它提供了一种有趣的体验,通常鼓励与人类的身体接触。 我们开发了基于视觉的反馈控制法则,使 GT-MAB 能够检测和跟踪人类。
我们将报告 GT-MAB 建模和控制方面的最新进展。 先进的控制技术可实现更稳定的飞行和更敏捷的运动,从而为 GT-MAB 带来新的应用。
专家报告持续更新中…
联系我们